��6�� С�������Ʋ���
������Ҫ
������Ҫ�������Ʋ�����ԭ�����������ص���ܵ��߲�����С���Dz���ԭ����ƽ����㷽���������ĵ�ˮ���������Ǹ̲߳���ԭ����������
��6.1 ���Ʋ�������
���Ļ���������ȷ�������ϵ���͵�ò�������λ�ã���ȷ���ռ�����ά���ꡣ�����Ĺ�������һ��ԭ�㿪ʼ��������ǰһ����ⶨ��һ�����λ�ã���Ȼ�Ὣǰһ�������������һ�����ϡ�������������������ۣ�����ﵽ���˵ij̶ȡ����ԣ�Ϊ�˱�֤�����λ�ľ��ȣ����������ۣ���������������ѭ�������嵽�ֲ��������ɸ����ͼ���������������鲿������֯ԭ��Ϊ�ˣ��������Ƚ�����������Ȼ����ݿ����������鲽�����Ͳ��衣���ڲ�������ѡ�������ɸ����Ƶ������ɵļ���ͼ�Σ���Ϊ��������
��������Ϊƽ��������߳̿��������֡��ⶨ���Ƶ�ƽ��λ��(x��y)�Ĺ����Ʒ�Ϊƽ����Ʋ������ⶨ���Ƶ�̣߳�H���Ĺ�����Ϊ�߳̿��Ʋ�����
��ȫ����Χ�ڽ����Ŀ���������Ϊ���ҿ�����������ȫ�����ֱ����߲�ͼ�Ļ�������������Ϊȷ���������״�ʹ�С�ṩ�о����ϡ����ҿ��������þ��ܲ��������ͷ�������ʩ�⾫�Ȱ�һ�����������Ĺ��ĸ��ȼ������ģ���ͼ����ܸ������ơ�
6.1.1 ƽ����Ʋ���
ƽ����Ʋ�����ȷ�����Ƶ��ƽ��λ�á�����ƽ��������ľ��䷽�������Dz����͵��߲�������ͼ6-1�У�A��B��C��D��E��F��ɻ����ڽӵ������Σ��۲����������ε��ڽǣ������ٲ�������һ���߳���Ϊ����ߣ�ͨ������Ϳ��Ի������֮������λ�á����������εĶ����Ϊ���ǵ㣬���ɵ����γ�Ϊ���������������ֿ��Ʋ�����Ϊ���Dz�����
ͼ6-1 ������
����ͼ6��2�п��Ƶ�1��2��3�������������������������ߵij��Ⱥ�ת�۽ǣ�ͨ������ͬ�����Ի������֮������λ�á����ֿ��Ƶ��Ϊ���ߵ㣬�������ֿ��Ʋ�����Ϊ���߲�����
ͼ6-2 ������
ƽ����������˾�������Dz����͵��߲����⣬�������Ǵ�ز�����Ŀǰ���õ���GPS���Ƕ�λ����6-3����A��B��C��D���Ƶ��ϣ�ͬʱ����GPS����![]() ��
��![]() ��
��![]() ��
��![]() ����������ߵ��źţ��Ӷ�ȷ�������λ����ΪGPS���Ʋ�����
����������ߵ��źţ��Ӷ�ȷ�������λ����ΪGPS���Ʋ�����
ͼ6-3 GPS��
����ƽ�������������ȫ����Χ�ڽ����Ŀ�����������ȫ�����ֱ����߲�ͼ���̽���Ļ�����������ҲΪ�ռ��ѧ�����;����ṩ��ȷ�ĵ�λ���ꡢ���롢��λ���ϣ���Ϊ�о������С����״������Ԥ�����ṩ��Ҫ���ϡ����ƣ���Ϊһ�����������ĵ����Dz����;��ܵ��߲�����ͼ6-4Ϊ���ֵ�������һ���������ǿ�������ʾ��ͼ��
 �����ͼƬ�Ŵ�
�����ͼƬ�Ŵ�
ͼ6-4 ���ֵ�������һ������������ʾ��ͼ
���п��Ʋ�����Ϊ������ߵ��β�����������������Ϊ���й滮��ʩ�������IJ������ݡ�����ƽ�������һ��ɷ�Ϊ���������ĵ���������һ������С��������һ�������������ߡ�Ȼ���ٲ���ͼ��С��������ͼ�����ߡ���1985����в����淶���似��Ҫ�����ڱ�6-l�ͱ�6-2��
������������ͼ������������Ҫ����Ҫ�� ��6-1
|
�ȼ� |
��������(��) |
���������պϲ�(��) |
ƽ���߳� (km) |
��ʼ���������� |
�������������� |
����� |
||
|
DJ1 |
DJ2 |
DJ3 |
||||||
|
���� |
��1.0 |
��3.5 |
9 |
1��30�� |
1��12�� |
12 |
|
|
|
���� |
��1.8 |
��7.0 |
5 |
��1��20�� |
1��8�� |
6 |
9 |
|
|
�ĵ� |
��2.5 |
��9.0 |
2 |
��1��12�� |
1��4.5�� |
4 |
6 |
|
|
һ�� |
��5 |
��15 |
1 |
1��4�� |
1��2�� |
|
2 |
6 |
|
���� |
��10 |
��30 |
0.5 |
1��2�� |
1��1�� |
|
1 |
2 |
|
ͼ�� |
��20 |
��60 |
�����ڲ�ͼ����Ӿ�1.7�� |
1��1�� |
|
|
|
1 |
���е���ͼ�����ߵ���Ҫ����Ҫ�� ��6-2
|
�ȼ� |
�������� (��) |
����DZպϲ�(��) |
���ϵ��߳���(km) |
ƽ���߳� (m) |
�������� (mm) |
ȫ���������� |
|
һ�� |
��5 |
|
3.6 |
300 |
��15 |
1��1.4�� |
|
���� |
��8 |
|
2.4 |
200 |
��15 |
1:1�� |
|
���� |
��12 |
|
1.5 |
120 |
��15 |
1:0.6�� |
|
ͼ�� |
��30 |
|
|
|
|
1��0.2�� |
ע��nΪ��վ����
���ſ�ѧ�����ķ�չ���ִ������������ij��֣����Dz�����һ��ͳ��λ�������ѱ����Ƕ�λ�����������1992������ƶ��ġ�GPS���Ʋ����淶����GPS�������ֳ�A��E�弶������6-3������A��B�൱�ڹ���һ���������ǵ㣬C��D�൱�ڳ��������ĵȡ��ҹ�����1992����ȫ�������˸���ȫ����A��GPS����27����1996�������ȫ��B��GPS����730�������п�����Ҳ��������GPS��λ������
GRS��������Ҫ����Ҫ�� ��6-3
|
|
A |
B |
C |
D |
E |
|
�̶����a(mm) �������ϵ��b(10 ���ڵ���С����(km) ���ڵ�������(km) ���ڵ�ƽ������(km) |
��5 ��0.1 100 ]200 300 |
��8 ��1 15 250 70 |
��10 ��5 5 40 15��10 |
��10 ��10 2 15 10��5 |
��10 ��20 1 10 5��2 |
6.1.2 �߳̿�����
�����߳̿���������Ҫ������ˮ��������ɽ��Ҳ���Բ������Ǹ̲߳����ķ����������߳̿����������ַ������ܵ��������Ӱ�죬�����ٶȿ죮���侫�Ƚ�ˮ�����͡�
����ˮ������Ϊһ�����������ĵȣ����裮һ������ˮ�������ø߾���ˮ�Ǻ;���ˮ������������ʩ�⣬��ɹ���Ϊȫ����Χ�ĸ߳̿���֮�á������ĵ�ˮ���������ڹ��Ҹ߳̿������ļ����⣬��С���������������߳̿�������
Ϊ�˳��н������Ҫ�������ĸ߳̿��Ƴ�Ϊ����ˮ���������ö��������ĵ�ˮ������ֱ��Ϊ�����ͼ�õ�ͼ��ˮ�������似��Ҫ�����ڱ�6-4��
������ͼ��ˮ��������Ҫ����Ҫ��(mm) ��6-4
 �����ͼƬ�Ŵ�ע����
�����ͼƬ�Ŵ�ע����![]() Ϊ��Ρ����λ�·�߳��ȣ�LΪ����·���߳��ȣ�
Ϊ��Ρ����λ�·�߳��ȣ�LΪ����·���߳��ȣ�![]() Ϊ����γ��ȣ�����ǧ�ơ�
Ϊ����γ��ȣ�����ǧ�ơ�
��ɽ����ָ·�������߲��400m�ĵ�����
��ƽԭ�������ɲ���GPSˮ�����ĵ�ˮ�������ڵ��αȽϸ��ӻ���ʹ��츴�ӵĵ���������GPSˮʱ������и߳��쳣������
��6.2 ֱ�߶�������������
6.2.1 ֱ�߶���ĸ���
ȷ��һ��ֱ�ߵķ����Ϊֱ�߶�����ֱ�߶�������Ҫѡ��һ���������ߣ���Ϊֱ�߶�������ݡ�
�ڲ����г��������������������Ϊ���������������ߵķ��������IJ����ķ����ⶨ���������ݾ�γ�Ƿ����ⶨ���������߿��������Dzⶨ��
���ڵ���ż��������ת���ϱ������غϣ���˹�������ij�������������������߲��غϡ�����֮��ļнdz�Ϊ��ƫ������![]() ��ʾ����ͼ6��5��
��ʾ����ͼ6��5��
ͼ6-5 �����������������
�������߱���ƫ�����������Զ�Ϊ��ƫ(+![]() )��ƫ��������������Ϊ��ƫ(-
)��ƫ��������������Ϊ��ƫ(-![]() )�������ϲ�ͬ�ص��ƫ��Ҳ��ͬ��
)�������ϲ�ͬ�ص��ƫ��Ҳ��ͬ��
�ҹ���ƫ�ǵı仯��Լ��+6�㡫-10��֮�䡣����������ƫ��Ϊ��ƫ��Լ-5�����ҡ�����ż��Dz��ϱ仯�ģ����ż�����ÿ��l0k���ٶ�����������ƶ������ڴż��仯����ƫ��Ҳ�ڱ仯�����⣬�����ǻ����ܵ��شų����ű���Ӱ�졣���Բ�����һ��������������Ϊ���������ߡ�ֻ����ʩ�����ѵĵ���������Ҫ�ߵĵ�������ɭ�ֿ������ô������ߡ�
�����ϲ�ͬ���ȵ����������������������������������߷���ļнdz�Ϊ����������������![]() ��ʾ����ͼ6-6��
��ʾ����ͼ6-6��
ͼ6-6 ������������
��A��BΪͬγ���ϵ����㣬�����Ϊ![]() ����A��B����ֱ��������ߵ����߽��ڵ���P�㡣AP��BPΪ�����߷�����A��B��̫Զʱ��������������
����A��B����ֱ��������ߵ����߽��ڵ���P�㡣AP��BPΪ�����߷�����A��B��̫Զʱ��������������![]() ������ʽ���㣺
������ʽ���㣺
![]() (6-1)
(6-1)
��ֱ��������BOP�У�![]() ��������ʽ�ã�
��������ʽ�ã�
![]() (6-2)
(6-2)
����ʽ�ɼ���γ�����ͣ���������������С���ڳ����Ϊ�㡣γ��Խ�ߣ�����������
6.2.2 ֱ�߶���
�����г��÷�λ�DZ�ʾֱ�߷��ӱ�����ı�����˳ʱ�뷽��ijֱ�ߵ�ˮƽ�нǣ���Ϊ��ֱ�ߵ���λ������ͼ6-7����λ��ֵ��0�㡫360�㡣
ͼ6-7��λ��
(1)�淽λ�Ǻʹŷ�λ��
��������Ϊ�������߷�������淽λ������A��ʾ����������Ϊ�������߷�������ŷ�λ������![]() ��ʾ���淽λ�Ǻʹŷ�λ��֮��Ĺ�ϵΪ��
��ʾ���淽λ�Ǻʹŷ�λ��֮��Ĺ�ϵΪ��
![]() (6-3)
(6-3)
(2)���귽λ��
�ڲ����г����ø�˹����������������Ϊ����������������ı��˰�˳ʱ�뷽��һֱ�ߵ�ˮƽ��Ϊ��ֱ�ߵ����귽λ�������Ϊ��λ������![]() ��ʾ��
��ʾ��
(3)���������
ͬһ��ֱ���ڲ�ͬ�˵����⣬�䷽λ��Ҳ��ͬ�������г���ֱ��ǰ�������Ϊ������֮��Ϊ��������ͼ6-8����AΪABֱ�ߵ���ˣ�BΪ�նˣ���![]() Ϊ���淽λ����
Ϊ���淽λ����![]() Ϊ���淽λ����
Ϊ���淽λ����
ͼ6-8 ��������λ��
�������淽λ��֮��Ĺ�ϵΪ��
![]() =
=![]() (6-4)
(6-4)
ʽ��![]() ��������Ϊ��ֱ��λ�������������Զ���
��������Ϊ��ֱ��λ�������������Զ���![]() Ϊ��������Ϊ����
������������
����һ��ֱ�ߵ����������귽λ���������������ǣ�����Ϊ��
![]() =
=![]() (6-5)
(6-5)
6.2.3 ���귽λ�ǵ�����
�ڲ�����Ϊ��ʹ�����ɹ�����ͳһ�����ܱ�֤�������ȣ������߶���β���ӳ�������������֪��AB��������AB�ߵ����귽λ��![]() ��֪���ֲⶨ��AB�ߺ�B1�ߵ�ˮƽ��
��֪���ֲⶨ��AB�ߺ�B1�ߵ�ˮƽ��![]() (��Ϊ���ӽ�)�����ת�۽�
(��Ϊ���ӽ�)�����ת�۽�![]() ��
��![]() ��
��![]() ��������������λ�ǵĹ�ϵ�Ͳⶨ��ת�۽ǿ����������������ϸ��߶ε����귽λ��(��ͼ6��9)���£�
��������������λ�ǵĹ�ϵ�Ͳⶨ��ת�۽ǿ����������������ϸ��߶ε����귽λ��(��ͼ6��9)���£�
ͼ6-9 ��λ�Ǽ���
![]() (6-6)
(6-6)
��ʽ��![]() ����������ǰ���������ǡ����ⶨ�����ҽ�������ʽ����
����������ǰ���������ǡ����ⶨ�����ҽ�������ʽ����
![]() (6-7)
(6-7)
6.2.4 ������������
(1)�������㹫ʽ
��֪�߳��ͷ�λ�ǣ�����֪��������������꣬��Ϊ�������㡣
��ͼ6��10��AΪ��֪�㣬������Ϊ![]() ��A��������B�ı߳�Ϊ
��A��������B�ı߳�Ϊ![]() (ƽ��)����λ��Ϊ
(ƽ��)����λ��Ϊ![]() ����B������Ϊ��
����B��������
![]() (6-8)
(6-8)
ʽ�У�![]() ��
��![]() ������������
������������
(2)���귴�㹫ʽ��
��֪�������꣬����߳��ͷ�λ�ǣ���Ϊ���귴��(��ͼ6��10)��
ͼ6-10 �������
��λ�ǹ�ʽΪ��
![]() (6-9)
(6-9)
�߳����㹫ʽΪ��
![]() (6-10)
(6-10)
ע�⣬��ʽ��6-9������Ľ������ǣ�R������Ӧ���ݷ�λ�������ǵĹ�ϵ�������ǻ���ɷ�λ�ǡ����ڲ������õ����궨������ѧ�еĵѿ������겻һ��������������Ҳ��ͬ����ͼ6-11�����귽λ�Ǻ����ǵĹ�ϵ����6-5 ��
��λ�Ǻ����ǵĹ�ϵ ��6-5
|
���� |
�ɷ�λ�ǻ������� |
�����ǻ��㷽λ�� |
|
���ޢ� |
R=�� |
��=R |
|
���ޢ� |
R=180�㣭�� |
��=180�㣭R |
|
���ޢ� |
R=����180�� |
��=180�㣫R |
|
���ޢ� |
R=360�㣭�� |
��=360�㣭R |
ͼ6-11 ����
��6.3 ���߲���
���߲���������Ҫ��ͨ�ӷ����٣��߳���ֱ�Ӳⶨ�����˲�������Ұ��������������������С���������ɽ��������ɭ�ֵȣ�Ҳ�����������ش��Ŀ��Ʋ���������·�������������ȡ�����ȫվ�ǵ��ռ���һ��վ��ͬʱ��ɲ�ࡢ��ǣ����߲��������㷺�����ڿ������Ľ������ر���ͼ�����ߵĽ�����
���߲����IJ�����ʽ�����¼��֣�
 �����ͼƬ�Ŵ�
�����ͼƬ�Ŵ�
ͼ6-12 ���ߵĻ�����ʽ
(1)�պϵ���
���ߵ������յ�Ϊͬһ����֪�㣬�γɱպ϶���Σ���ͼ6-12(a)��B��Ϊ��֪�㣬![]() ������
������![]() Ϊ����㣬
Ϊ����㣬![]() Ϊ��֪����
Ϊ��֪����
(2)���ϵ���
������������֪��֮��ĵ��߳�Ϊ���ϵ��ߡ���ͼ6-12(b)��B��Ϊ��֪�㣬![]() Ϊ��֪������
Ϊ��֪������![]() ����ϵ���֪��C����֪����
����ϵ���֪��C����֪����![]() ��
��
(3)֧����
��һ����֪��������ص�ԭ�㣬Ҳ�����ϵ�������֪��ĵ��߳�Ϊ֧������֧����Ҳ�����ɵ��ߣ���ͼ6-12(c)������֧��������ˣ��ʲ���ʱӦʮ����ϸ���淶�涨֧���߲��ó��������ߡ�
6.3.1 ���߲�����ҵ����
���߲�����ҵ��������̤��ѡ�㡢�ǶȲ������߳�������
(1)̤��ѡ��
��̤��ѡ��ǰӦ�����Ѽ��������й����ϣ������ͼ�����п��Ƶ������̣߳������Ƶ��֮�ǡ���ͼ�Ϲ滮���߲��跽����Ȼ���ֳ�ѡ�㣬���־��
ѡ��ע�����
�ٵ��ߵ�Ӧѡ�����ʼ�Ӳ���ܳ��ڱ���ͱ��ڹ۲�ĵط���
�����ڵ��ߵ��ͨ�����ã����ڲ�ǡ����ߡ�
�۵��ߵ���Ұ���������ڲ����Χ����͵�ò��
�ܵ��߱߳�Ӧ������ȣ�������������̣����ڱ߳�֮�Ȳ�Ӧ����������
���ߵ�ѡ����Ӧ�ڵ����Ͻ�����־�����ص�������˳���ţ����Ƶ�����ͼ���Եȼ����ߵ�Ӧ���淶�������������ͼ6-13(a)�����ڵ��ߵ㸽�������Ե���(���ǡ����)��������ע�����ߵ��ź;��룬�����Ʋ�ͼ��ע���ߴ磬��Ϊ��֮�ǣ���ͼ6-13(b)��
 �����ͼƬ�Ŵ�
�����ͼƬ�Ŵ�
ͼ6-13 ����������֮��
(2)��ҵ����
�ٱ߳�����
���߱߳����õ�Ų�����Dzⶨ�����ڲ����б�࣬���Ҫͬʱ����ֱ�ǣ�����ƽ�������ͼ������Ҳ�ɲ��øֳ����ࡣ������������Ծ��Ȳ��õ���1��3000���������ѵ�������1��1000����������б������
�ڽǶȲ���
���߽ǶȲ�����ת�۽Dz��������ӽDz������ڸ�������������Ľ�Ϊת�۽ǣ���һ������Ϊת�۽Dz�������ͼ6-12��![]() ��
��![]() ����Щ�Ƿ�Ϊ��Ǻ��ҽǡ��ڵ���ǰ�������Ҳ��ˮƽ��Ϊ�ҽǣ���ͼ6-12(a)������Ϊ��ǣ���ͼ6��12(b)���ԽǶȲ������ȵ�Ҫ�����6-2������Ӧ������Ƶ����⣬���ܵõ���ʼ��λ�ǣ���һ������Ϊ���ӽDz�����Ҳ�Ƶ��߶���Ŀ����ʹ���ߵ����������������ϵͳ��õ���ͳһ����ϵͳ�����ϵ�����������֪�����ӣ�Ӧ���������ӽ�
����Щ�Ƿ�Ϊ��Ǻ��ҽǡ��ڵ���ǰ�������Ҳ��ˮƽ��Ϊ�ҽǣ���ͼ6-12(a)������Ϊ��ǣ���ͼ6��12(b)���ԽǶȲ������ȵ�Ҫ�����6-2������Ӧ������Ƶ����⣬���ܵõ���ʼ��λ�ǣ���һ������Ϊ���ӽDz�����Ҳ�Ƶ��߶���Ŀ����ʹ���ߵ����������������ϵͳ��õ���ͳһ����ϵͳ�����ϵ�����������֪�����ӣ�Ӧ���������ӽ�![]() ��
��![]() ���պϵ��ߺ�֧����ֻ���һ�����ӽ�
���պϵ��ߺ�֧����ֻ���һ�����ӽ�![]() ����ͼ6-12�����ڶ���������Χ�����Ƶ�ʱ���ɼٶ�ij�����꣬�������Dzⶨ��ʼ�ߵĴŷ�λ����Ϊ�������ݡ�
����ͼ6-12�����ڶ���������Χ�����Ƶ�ʱ���ɼٶ�ij�����꣬�������Dzⶨ��ʼ�ߵĴŷ�λ����Ϊ�������ݡ�
6.3.2 ���߲�����ҵ����
������ҵ����֮ǰ��Ӧȫ���鵼����ҵ������¼���ɹ��Ƿ���Ͼ���Ҫ��Ȼ����Ƶ�����ͼ��ע��ʵ��߳���ת�۽ǡ����ӽǺ���ʼ���꣬�Ա��ڵ���������㣬��ͼ6-14 ��
 �����ͼƬ�Ŵ�
�����ͼƬ�Ŵ�
ͼ6-14 ���ϵ���
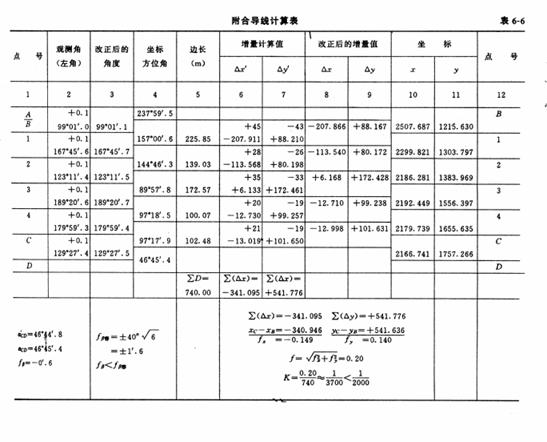
(1)���ϵ�����
���ڸ��ϵ�������������֪���ϲ���ĵ��ߣ���˲����ɹ�Ӧ������������������
a.��λ�DZպ�������������֪��λ��![]() ��ͨ����
��ͨ����![]() �������CD�߷�λ��
�������CD�߷�λ��![]() ��Ӧ����֪��λ��
��Ӧ����֪��λ��![]() ���¡�
���¡�
b.���������պ�����������B����֪����![]() �������߳��ͷ�λ��������õ�C������
�������߳��ͷ�λ��������õ�C������![]() ��
��![]() Ӧ����֪C������
Ӧ����֪C������![]() ��
��![]() һ�¡�
һ�¡�
�������������Ǹ��ϵ�����ҵ�۲�ɹ�������������ǵ����������ƽ��Ļ���������㲽�����£�
�����귽λ�ǵļ�����Ƕȱպϲ�ĵ���
����ʽ(6-6)������CD�����귽λ��Ϊ��
![]() (6-11)
(6-11)
���ڲ�Ǵ���������![]() ��
��![]() �в��Ϊ�Ƕȱպϲ
�в��Ϊ�Ƕȱպϲ
![]() (6-12)
(6-12)
������![]() ����
����![]() ��
��
���ݱ�6-2��ͼ�����߽Ƕȱպϲ��������Ϊ��
![]()
��![]() ��
��![]() ��˵���ǶȲ������ޣ�Ҫ���²�ǣ���
��˵���ǶȲ������ޣ�Ҫ���²�ǣ���![]() ��
��![]() ����ֻ��Ը��ǶȽ��е��������ڸ��Ƕ���ͬ���ȹ۲⣬���Խ��Ƕȱպϲ����ƽ����������ǣ�Ȼ���ټ�����߷�λ�ǡ�����Լ����
����ֻ��Ը��ǶȽ��е��������ڸ��Ƕ���ͬ���ȹ۲⣬���Խ��Ƕȱպϲ����ƽ����������ǣ�Ȼ���ټ�����߷�λ�ǡ�����Լ����![]() ��
��![]() �Ƿ������Ϊ��ˡ�
�Ƿ������Ϊ��ˡ�
�����������պϲ�ļ��������
������������ĸ������귽λ�Ǻͱ߳������Լ�����ߵ�����������������������֮��������Ӧ����Ƶ�B��C�������һ�£�����һ�£�����������Ϊ���������պϲ�![]() ��
��![]() ������ʽΪ��
������ʽΪ��
 (6-13)
(6-13)
����![]() ��
��![]() �Ĵ��ڣ�ʹ�������C�����C�㲻�غϣ���ͼ6-15��
�Ĵ��ڣ�ʹ�������C�����C�㲻�غϣ���ͼ6-15��
ͼ6-15 ����ȫ���պϲ�
CC����![]() ��ʾ����Ϊ����ȫ���պϲ����ʽ��ʾ��
��ʾ����Ϊ����ȫ���պϲ����ʽ��ʾ��
![]() (6-14)
(6-14)
![]() ֵ�͵���ȫ��
ֵ�͵���ȫ��![]() ֮��K��Ϊ����ȫ����Ապϲ����
֮��K��Ϊ����ȫ����Ապϲ����
![]() (6-15)
(6-15)
Kֵ�Ĵ�С��ӳ�˲�ǺͲ�ߵ��ۺϾ��ȡ���ͬ���ߵ���Ապϲ�����ֵ��ͬ������6-2��ͼ������KֵС��1��2000�����ѵ���Kֵ�ɷſ���1��1000��
һ�������������������![]() Ӧ����ԭ��Ҫʱ�ز⡣��
Ӧ����ԭ��Ҫʱ�ز⡣��![]() ֵ���Ͼ���Ҫ���Խ�����������������
ֵ���Ͼ���Ҫ���Խ�����������������
������![]()
![]()
![]() ��
��![]()
�����ķ����ǽ�![]() ��
��![]() ���Ű���߳������ȵ�ԭ����з��䣬���ڵ�
���Ű���߳������ȵ�ԭ����з��䣬���ڵ�![]() �ߵ�������������ֵΪ��
�ߵ�������������ֵΪ��
 (6-16)
(6-16)
������ϣ����������������֮��Ӧ��B��C�����������ȣ��Դ���Ϊ��ˡ�
���������
������ʼ��B�����꼰��������ߵ�������������ʽ����������꣺
����������C�������Ӧ��ԭ��C������һ�¡�
���ϵ�������б�����㣬����6-6��
���ϵ������ ��6-6
 �����ͼƬ�Ŵ� (2)�պϵ�����
�����ͼƬ�Ŵ� (2)�պϵ�����
�պϵ����㷽���븽�ϵ�����ͬ��ҲҪ����Ƕȱպ�����������պ�������
�ٽǶȱպϲ�ļ��������
�պϵ��߲�����ڽǣ����ԽǶȱպ�������Ҫ����n������ڽǺ�������
![]()
�Ƕȱպϲ�
![]() (6-18)
(6-18)
�����������պϲ�ļ��������
�պϵ��ߵ����յ���һ���㣬����������������ֵΪ�㡣���������պϲ�Ϊ��
 (6-19)
(6-19)
�Ƕȱպϲ�![]() �����������պϲ�
�����������պϲ�![]() ��
��![]() ������ȫ���պϲ�
������ȫ���պϲ�![]() �ļ���͵���ͬ���ϵ��ߡ����������ͨ���������������������㣬�������꣬����ƻص�1������Ӧ��ͬ����Ϊ�����ˡ���6-7Ϊͼ6-16�ıպϵ��������
�ļ���͵���ͬ���ϵ��ߡ����������ͨ���������������������㣬�������꣬����ƻص�1������Ӧ��ͬ����Ϊ�����ˡ���6-7Ϊͼ6-16�ıպϵ��������
ͼ6-16 �պϵ��ߡ��
�պϵ����������� ��6-7
 �����ͼƬ�Ŵ�
�����ͼƬ�Ŵ�
��6.4 ���Dz���
С���Dz����뵼�߲�����ȣ����߹�������Ϊ���١�������ɽ��������ͳ�����������������С���Dz�������ƽ������������������õĻ���ͼ���е����������е����Ρ�����ı��Ρ��������ȣ���ͼ6��17��ʾ������ֻ���ܵ�������������
��a������������(b)�е����Σ�(c)����ı��Σ�(d)������
ͼ6-17 С�������Ļ���ͼ��
6.4.1 С���Dz�����ҵ
С���Dz�����ҵ��������̤��ѡ�㡢�ǶȲ����ͻ��߲߱�����
(1)ѡ�㡢������־
ͬ���߲�����ѡ��ǰҪ�Ѽ��������еĵ���ͼ�Ϳ��Ƶ�ɹ�����ͼ�ϳ����ⶨ�����������ٵ�ʵ��̤����ѡ�㡣
ѡ��Ӧע�����¼��㣺
�ٻ���Ӧѡ�ڵ���ƽ̹����������ĵط�(�õ�Ų�����Dz���ߣ����ܴ�����)
�����ǵ�Ӧѡ�ڵ��ƽϸߡ����ʼ�ʵ�ĵط����������ǵ�Ӧ����ͨ�ӡ�
��Ϊ��֤����߳��ľ��ȣ��������ڽ�һ�㲻ӦС��30�㣬������120�㡣
С���ǵ�ѡ����ͬ���߲���һ��Ӧ�ڵ��������־�����Ƶ�֮�ǡ�
(2)�ǶȲ���
�ǶȲ�����С���Dz�������Ҫ��ҵ�������йؼ���ָ�����6-1�����ǵ�����־һ���û��˻�С��ˣ��ײ������ǵ��־���ģ�����ø˼ܻ�����Ǧ˿����������֤���˴�ֱ�����߳��϶�ʱ����������֧�����Ҵ����ڴ�������ϵһС����������־����ͼ6��18��
�����ǵ��ϣ����۲ⷽ��������ʱ�����ò�ط���ǣ����۲ⷽ��Ϊ��������������ʱ������ȫԲ��ط������������������3�¡�
ͼ6-18 С���ǵ�����־
�ǶȲ���ʱӦ��ʱ����������νǶȱպϲ�![]() ����ʽΪ
����ʽΪ
![]()
ʽ�У�![]() ����������š�
����������š�
��![]() ������6-1�Ĺ涨��Ӧ�ز⡣�Ƕȹ۲������������ʽ�����������
������6-1�Ĺ涨��Ӧ�ز⡣�Ƕȹ۲������������ʽ�����������![]() ��
��
![]() (6-21)
(6-21)
(3)���߲���
һ����õ�Ų���������������ʼ�ߵ�ƽ�ࡣ�����øֳ�����ʱ��Ҫ�þ�������������
6.4.2 С���Dz�����ҵ����
С���Dz�����ҵ���������ҵ�ɹ�����������飬���Dz����ɹ�ƽ����㣬�߳���������㡣һ��ͼ��С���Dz���������ý���ƽ�һ������С���Dz���������ƽ�������Ҫ����ͼ���������Ľ���ƽ����㷽����
��1������С���Dz�����ͼ
ͼ6-19Ϊ����������ͼ��ͼ��![]() ��
��![]() ����ʼ�ߡ��ӵ�һ�������ο�ʼ����
����ʼ�ߡ��ӵ�һ�������ο�ʼ����![]() �����������Ҷ�����������һ�������ι��ñߵı߳�����ʱ�ñ߳���Ϊ�ڶ��������ε���֪�ߡ��������ƣ������Ƴ����������εı߳���Ϊ�˷��㣬�������ڽǰ����¹涨��ţ���֪�����ԵĽ�Ϊ
�����������Ҷ�����������һ�������ι��ñߵı߳�����ʱ�ñ߳���Ϊ�ڶ��������ε���֪�ߡ��������ƣ������Ƴ����������εı߳���Ϊ�˷��㣬�������ڽǰ����¹涨��ţ���֪�����ԵĽ�Ϊ![]() ����������ԵĽ�Ϊ
����������ԵĽ�Ϊ![]() �����������ԵĽ�Ϊ
�����������ԵĽ�Ϊ![]() ��
��![]() ��
��![]() ��Ϊ����ǣ�
��Ϊ����ǣ�![]() ��Ϊ����ǡ�
��Ϊ����ǡ�
(2)�Ƕȱպϲ�ļ��������
��![]() ��
Ϊ��![]() �������εĽǶȹ۲�ֵ����������εĽǶȱպϲ���ʽ(6-18)���㣬ͼ��С���ǽǶȱպϲ�����ֵ
�������εĽǶȹ۲�ֵ����������εĽǶȱպϲ���ʽ(6-18)���㣬ͼ��С���ǽǶȱպϲ�����ֵ![]() ��60�塣��
��60�塣��![]() ��
��![]() ,����нǶȱպϲ������
,����нǶȱպϲ������
����Ƕȵ�һ�θ�����Ϊ![]() ������Ƕ�Ϊͬ���ȹ۲⣬��������Ӧ��ȡ��ʸ�����Ϊ��
������Ƕ�Ϊͬ���ȹ۲⣬��������Ӧ��ȡ��ʸ�����Ϊ��
![]() (6-22)
(6-22)
����ֵȡ����λ����һ�θ�����Ľ�ֵΪ��
 (6-23)
(6-23)
������һ�θ�����ĽǶ�Ӧ���������αպ�����������
![]() (6-24)
(6-24)
(3)���߱պϲ�ļ��������
���ݻ���![]() �͵�һ�θ�����Ľ�ֵ
�͵�һ�θ�����Ľ�ֵ![]() ��
��![]() �����Ҷ���������һ������
�����Ҷ���������һ������![]() ��
��
ʽ��![]() Ϊ���˷��š�
Ϊ���˷��š�
����ĵڶ�������![]() Ӧ��ʵ���
Ӧ��ʵ���![]() ��ȡ������ڵ�һ�θ�����ĽǶ���������������
��ȡ������ڵ�һ�θ�����ĽǶ���������������![]()
![]()
![]() ���Ӷ��������߱պϲ�
���Ӷ��������߱պϲ�![]() ��
��
 (6-25)
(6-25)
������![]() �����
�����![]() ��
��![]() ���еڶ��θ�������
���еڶ��θ�������![]() Ϊ�Ƕȵڶ��θ���������
Ϊ�Ƕȵڶ��θ���������
 (6-26)
(6-26)
��ʽ(6-26)��̨�ͼ���չ����ȡǰ����ã�
 (6-27)
(6-27)
��ʽ(6-27)����ʽ(6-26)���ã�
 �����ͼƬ�Ŵ�
(6-28)
�����ͼƬ�Ŵ�
(6-28)
����![]() ����������
����������
![]()
����ʽ����ʽ(6-28)���ã�
Ϊʹ�ڶ��θ��������������������ڽ�֮��Ϊ180�㣬��ʹ![]() ��
��![]() ��С��ȣ������෴��������
��С��ȣ������෴��������![]()
���߱պϲ�Ϊ��
 (6-30)
(6-30)
��
![]() (6-31)
(6-31)
�ڶ��θ�����ĽǶ�ֵ![]() Ϊ��
��
 (6-32)
(6-32)
(4)�߳����������
���ݵڶ��θ�����ĽǶȺͻ���![]() �������Ҷ������������θ��߳��������õ�
�������Ҷ������������θ��߳��������õ�![]() Ӧ��
Ӧ��![]() ��ȡ�
��ȡ�
��ø��߳�������ĽǶȣ����պϵ�����������ꡣ
��ͼ6-19Ϊ�������������㲽�裬�ǶȺͱ߳��������6-8������������6-9������������㰴A-C-E-F-D-B-A�պϵ��߽��С�
�������պϲ������߳������ ��6-8
|
������ |
�Ǻ� |
�Ƕȹ۲�ֵ ( ����) |
��һ�θ���(��) |
��һ�θ�����Ƕ�( ����) |
|
�ڶ��θ���(��) |
�ڶ��θ�����Ƕ� ( ����) |
�߳� (m) |
|
1 |
|
63 41 18 51 13 44 65 04 48 |
+3 +3 +4 |
63 41 21 51 13 47 65 04 52 |
+0.49 +0.80 |
+2 -2 |
61 41 23 51 13 45 65 04 52 |
415.607 361.478 420.475 |
|
|
179 59 50 |
|
180 00 00 |
180 00 00 |
||||
|
2 |
|
41 05 39 58 16 12 80 38 15 |
-2 -2 -2 |
41 05 37 58 16 10 80 38 13 |
+1.15 +0.62 |
+2 -2 |
41 05 39 58 16 08 80 38 13 |
321.188 415.607 482.138 |
|
|
180 00 06 |
|
180 00 00 |
180 00 00 |
||||
|
3 |
|
60 08 24 63 07 34 56 43 50
|
+4 +4 +4 |
60 08 28 63 07 38 56 43 54 |
+0.57 +0.51 |
+2 -2 |
60 08 30 63 07 36 56 43 54 |
312.276 321.188 301.061 |
|
|
179 59 48 |
|
180 00 00 |
180 00 00 |
||||
|
4 |
|
53 59 25 75 39 28 50 21 16 |
-3 -3 -3 |
53 59 22 75 39 25 50 21 13 |
+0.73 +0.26 |
+2 -2 |
53 59 24 75 39 23 50 21 13 |
260.732 312.276 248.188 |
|
|
180 00 09 |
|
180 00 00 |
180 00 00 |
||||
|
|
|
|
|
|
+5.13 |
|
|
|
![]()
�������������� ��6-9
|
���ǵ� |
ת�۽�(���) ( ����) |
ת��λ�� ( ����) |
�߳�D (m) |
��������(m) |
���� (m) |
���ǵ� |
||
|
|
|
|
|
|||||
|
B |
|
22 56 00 |
|
|
|
|
|
|
|
A |
63 41 23 |
86 37 23 |
420.475 |
+24.768 |
+419.745 |
500.000 |
500.000 |
A |
|
C |
192 00 28 |
98 37 51 |
301.061 |
-45.180 |
+297.652 |
524.768 |
919.745 |
C |
|
E |
113 28 49 |
32 06 40 |
260.732 |
+220.845 |
+138.595 |
479.588 |
1217.397 |
E |
|
F |
75 39 23 |
287 46 03 |
248.189 |
+75.736 |
-236.351 |
700.433 |
1355.992 |
F |
|
D |
168 59 26 |
276 45 29 |
482.138 |
+56.737 |
-478.788 |
776.169 |
1119.641 |
D |
|
B |
106 10 31 |
22 56 00 |
361.478 |
-332.906 |
-140.853 |
832.906 |
640.853 |
B |
|
A |
|
|
|
|
|
500.000 |
500.000 |
A |
��6.5 ���ᶨ��
��ԭ�п��Ƶ㲻�����㹤����Ҫʱ�����ý��ᷨ���ܿ��Ƶ㣬��Ϊ���ᶨ�㡣���õĽ��ᷨ��ǰ�����ᡢ����;��뽻�ᡣ
6.5.1 ǰ������
��ͼ6-20(a)������֪��A��B���ֱ��P��۲���ˮƽ��![]() ��
��![]() ����P�����꣬��Ϊǰ�����ᡣΪ�˼�˺����P�㾫�ȣ�ͨ�����������֪��A��B��C�ֱ���P��۲�ˮƽ�ǣ���ͼ 6-20(b)���ֱ������������μ���P�����ꡣ
����P�����꣬��Ϊǰ�����ᡣΪ�˼�˺����P�㾫�ȣ�ͨ�����������֪��A��B��C�ֱ���P��۲�ˮƽ�ǣ���ͼ 6-20(b)���ֱ������������μ���P�����ꡣ
 �����ͼƬ�Ŵ�
ͼ6-20 ǰ������
�����ͼƬ�Ŵ�
ͼ6-20 ǰ������
����һ��������Ϊ��˵��ǰ������Ķ��㷽����
(1)������֪��A��B����ֱ�Ϊ��![]() ���ͣ�
���ͣ�![]() ��������֪��AB�ķ�λ�Ǻͱ߳�Ϊ��
��������֪��AB�ķ�λ�Ǻͱ߳�Ϊ��
 (6-33)
(6-33)
(2)��A��B������վ�����ˮƽ��![]() ��������AP��BP�ߵ����귽λ�Ǻͱ߳�
��������AP��BP�ߵ����귽λ�Ǻͱ߳�
��ͼ6-20a�ã�
 (6-34)
(6-34)
 (6-35)
(6-35)
ʽ�У�
![]() (6-36)
(6-36)
(3)������P������
�ֱ���A���B�㰴��ʽ����P�����꣬��У�ˡ�
 (6-37)
(6-37)
�������һ��Ӧ��A��B���꣨![]() ���ͣ�
���ͣ�![]() ������A��B������վ�������ˮƽ��
������A��B������վ�������ˮƽ��![]() ֱ�Ӽ���P������Ĺ�ʽ����ʽ�Ƶ����ԡ�
ֱ�Ӽ���P������Ĺ�ʽ����ʽ�Ƶ����ԡ�
 (6-38)
(6-38)
Ӧ��ʽ(6-38)ʱ������ֱ�����ü���������Ҫע��A��B��P�ĵ���밴��ʱ���������(��ͼ6-20)��
ǰ������������6-10��
ǰ���������� ��6-10
 �����ͼƬ�Ŵ�
�����ͼƬ�Ŵ�
6.5.2 ����
ͼ6-21��A��B��CΪ��֪�㣬����γ�ǰ�����P���ϣ��۲�P����A��B��C������ļн�![]() ��������֪�����꣬��������P�����꣬���ַ�����Ϊ���ᡣ���ŵ��Dz����ڶ��������վ�۲⣬Ұ������٣��ʵ���֪�㲻����ʱ���ɲ��ú��ᷨȷ�������㡣���ᷨ���㹤�������㹫ʽ�ܶ࣬�������������һ�ּ��㷽������ȫ�й�ʽ����
��������֪�����꣬��������P�����꣬���ַ�����Ϊ���ᡣ���ŵ��Dz����ڶ��������վ�۲⣬Ұ������٣��ʵ���֪�㲻����ʱ���ɲ��ú��ᷨȷ�������㡣���ᷨ���㹤�������㹫ʽ�ܶ࣬�������������һ�ּ��㷽������ȫ�й�ʽ����
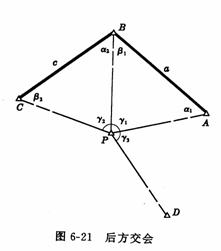
������ܾ��嶨�㷽����
(1) ������֪��A��B��C�����꣨![]() ���ͣ�
���ͣ�![]() �����������귴�㹫ʽ����AB��BC���귽λ��
�����������귴�㹫ʽ����AB��BC���귽λ��![]() �ͱ߳�
�ͱ߳�![]() ��
��
(2)����![]() ��
��
��ͼ6-21�пɼ���
![]()
����
![]() (6-39)
(6-39)
����
![]() (6-40)
(6-40)
�ڦ�APB�ͦ�BPC�У��������Ҷ����ɵã�
���������ɵã�
![]() (6-41)
(6-41)
����ʽ(6-40)��ʽ(6-41)�ɽ��![]() ��
��![]() ��
��
(3)����![]() ��
��![]()
![]() (6-42)
(6-42)
![]() (6-43)
(6-43)
����![]() ��
��![]() ֮��Ӧ����
֮��Ӧ����![]() ����ˡ�
����ˡ�
(4)Ȼ������ǰ�����ṫʽ(6-38)����P�����ꡣ
Ϊ�ж�P�㾫�ȣ�������P��Ե��ĸ���֪��D���й۲⣬���![]() �������Ѽ������P�������A��D�������귴��
�������Ѽ������P�������A��D�������귴��![]() �����
�����![]() ��
��
![]() (6-44)
(6-44)
����ͼ���㣬![]() ����ֵΪ��40�塣
����ֵΪ��40�塣
��6-11Ϊ�����й�ʽ��������������![]()
��������(���й�ʽ) ��6-11
 �����ͼƬ�Ŵ�
�����ͼƬ�Ŵ�
(5)�����Σ��Բ
��������Pλ��������֪��A��B��C�����Բʱ������P��λ�ڸ�Բ�κ�λ�ã���![]() ��
��![]() �����䣬���P���⡣�ʳƴ����ԲΪΣ��Բ����ͼ6-22����P����Σ��Բ��ʱ�����У�
�����䣬���P���⡣�ʳƴ����ԲΪΣ��Բ����ͼ6-22����P����Σ��Բ��ʱ�����У�
![]() (6-45)
(6-45)
6-22 �����Σ��Բ
��![]() ֵ����ʽ(6-41)����ʽ�⡣ʵ�ʹ����У�P��λ��Σ��Բ�ϵ�����Ǽ�żȻ�ģ�������Σ��Բ����ʱ�����������������ܴ�Ϊ�˱���P������Σ��Բ�������涨�����
ֵ����ʽ(6-41)����ʽ�⡣ʵ�ʹ����У�P��λ��Σ��Բ�ϵ�����Ǽ�żȻ�ģ�������Σ��Բ����ʱ�����������������ܴ�Ϊ�˱���P������Σ��Բ�������涨�����![]() ��
��![]() ��̶���B��Ӧ��160�㡫180��֮�䣬����Ӧ����ѡ���λ��
��̶���B��Ӧ��160�㡫180��֮�䣬����Ӧ����ѡ���λ��
6.5.3 ���뽻��
���ŵ�Ų�����ǵ�Ӧ�ã����뽻��Ҳ��Ϊ���ܿ��Ƶ��һ�ֳ��÷�������ͼ6-23����������֪��A��B�Ϸֱ�����������![]() �ı߳�
�ı߳�![]() �����
�����![]() �����꣬��Ϊ���뽻�ᡣ
�����꣬��Ϊ���뽻�ᡣ
ͼ6-23 ���뽻��
������ܾ��嶨�㷽����
��1��������֪��A��B���꣨![]() ���ͣ�
���ͣ�![]() ����λ��
����λ��![]() �ͱ߳�
�ͱ߳�![]() ��
��
(2) ��![]() ����AB���߽���Q�㡣����
����AB���߽���Q�㡣����![]() Ϊ
Ϊ![]() ��
��![]() Ϊ
Ϊ![]() ���������Ҷ�����A�ǡ�
���������Ҷ�����A�ǡ�
 (6-46)
(6-46)
 (6-47)
(6-47)
(3) ![]() ��������
��������
 ��4-48��
��4-48��
��ʽP1����AB�߶��ҲࣨA��B��P1˳ʱ�빹�������Σ���
��������P2��AB�߶���ࣨA��B��P2��ʱ�빹�������Σ�����ʽΪ��
 (6-49)
(6-49)
���뽻������������6-12��
���뽻������ ��6-12
|
��ͼ�빫ʽ |
|
|
|||||
|
��֪���� |
|
1035.147 |
|
2601.295 |
�۲����� |
|
703.760 |
|
|
1501.295 |
|
3270.053 |
|
670.486 |
||
|
|
55��07��20�� |
|
815.188 |
|
435.641 |
||
|
|
552.716 |
|
1737.692 |
|
2642.625 |
||
��6.6 �����ĵ�ˮ����
�����ĵ�ˮ�����������ڹ��Ҹ߳̿������ļ����⣬��������С���������߳̿��ƣ��Լ����̽�������ڹ��̲����ͱ��ι۲�Ļ������ơ������ĵ�ˮ��Ӧ�Ӹ����Ĺ��Ҹ�һ��ˮ������̡߳�
���̽�������������ĵ�ˮ��ļ��ɸ���ʵ����Ҫ������һ��Ϊ1~2km���ң�Ӧ������ͨˮ��ʯ����ʱˮ���־�����������ʯ��ƽ����Ƶ���Ϊˮ�㡣�ڳ�������ע�ⲻҪѡ�ڵ��¹����Ϸ������볧����ߴ����ﲻС��25m������Ӱ����5m���⣬��������߲�����5m��
�����ĵ�ˮ������Ҫ���ʩ�ⷽ���ǣ�
�������ĵ�ˮ����ʹ�õ�ˮ�ߣ�ͨ����˫��ˮ�ߡ�������ߺ���ijߵ�Ϊ0������ijߵ�һ��Ϊ4.687m��һ��Ϊ4.787m��
�����߳��ȺͶ������������6-13���߲�պϲ�Ĺ涨����6-4��
�����ĵ�ˮ������ ��6-13
|
�ȼ� |
�����߳��� (m) |
ǰ���Ӿ�� (m) |
ǰ���Ӿ��ۼƲ�(m) |
���������� (mm) |
�����߲�֮�� (mm) |
|
�� �� |
75 100 |
3.0 5.0 |
5.0 10.0 |
2.0 3.0 |
3.0 5.0 |
�����ĵ�ˮ�����Ĺ۲�����㷽�����£�
��(��)��ˮ�����۲��ֲ� ��6-14
��Σ�A~B ���ڣ�1993��5��10�� �������Ϲ�60252
��ʼ��7ʱ05�� �������硢�� �۲��ߣ��� ��
������8ʱ07�� ���������ȶ� ��¼�ߣ�Ф ��
|
��վ��� |
��� |
��� |
�� ˿ |
ǰ�� |
��˿ |
���� �� �� |
��˿ˮ�߶��� |
K+��-�� |
ƽ�� �߲� |
��ע |
|
|
��˿ |
��˿ |
��ɫ�� |
��ɫ�� |
||||||||
|
|
|
(1) (2) (9) (11) |
(4) (5) (10) (12) |
�� ǰ ��-ǰ |
(3) (6) (15) |
(8) (7) (16) |
(14) (13) (17) |
(18) |
|
||
|
1 |
A~ת1 |
1.587 1.213 37.4 -0.2 |
0.755 0.379 37.6 -0.2 |
�� ǰ ��-ǰ |
1.400 0.567 +0.833 |
6.187 5.255 +0.932 |
0 -1 +1 |
+0.8325 |
|
||
|
2 |
ת1~ת2 |
2.111 1.737 37.4 -0.1 |
2.186 1.811 37.5 -0.3 |
��02 ǰ02 ��-ǰ |
1.924 1.998 -0.074 |
6.611 6.786 -0.175 |
0 -1 +1 |
-0.0745 |
|
||
|
3 |
ת2~ת3 |
1.916 1.541 37.5 -0.2 |
2.057 1.680 37.7 -0.5 |
��01 ǰ02 ��-ǰ |
1.728 1.868 -0.140 |
6.515 6.556 -0.041 |
0 -1 +1 |
-0.1405 |
|
||
|
4 |
ת3~ת4 |
1.945 1.680 26.5 -0.2 |
2.121 1.854 26.7 -0.7 |
��02 ǰ01 ��-ǰ |
1.812 1.987 -0.175 |
6.499 6.773 -0.274 |
0 +1 -1 |
-0.1745 |
|
||
|
5 |
ת4~B |
0.675 0.237 43.8 +0.2 |
2.902 2.466 43.6 -0.5 |
��01 ǰ02 ��-ǰ |
0.466 2.684 -2.218 |
5.254 7.371 -2.117 |
-1 0 -1 |
-2.2175 |
|
||
(1)һ����վ�ϵĹ۲�˳��(�μ���6-14)
�����ӳߺ��棬��ȡ�¡��ϡ���˿����(1)��(2)��(3)��
��ǰ�ӳߺ��棬��ȡ�¡���˿����(4)��(5)����˿����(6)��
��ǰ�ӳߺ��棬��ȡ��˿����(7)��
�����ӳߺ��棬��ȡ��˿����(8)��
���֡���ǰ��ǰ���Ĺ۲�˳����Ҫ��Ϊ����ˮ����ˮ���³����������ĵ�ˮ����ÿվ�Ĺ۲�˳��Ҳ����Ϊ����ǰ��ǰ���������ڡ��졪�ڡ��족��
���и�����˿����(3)��(6)��(7)��(8)����������߲�ġ���ˣ���ÿ�ζ�ȡ��˿����ǰ����Ҫע��ʹ�������ݵ��������������غϡ�
(2)��վ�ļ��㡢�������
���Ӿ����
���Ӿ��룺(9)=(1)��(2)��
ǰ�Ӿ��룺(10)��(4) ��(5)��
ǰ�����Ӿ�(11)=(9) ��(10)������ˮ���������ó�����3m���ĵ�ˮ���������ó�����5m��
ǰ�����Ӿ��ۻ����վ(12)��ǰվ(12)+��վ(11)������ˮ�������ó�����5m���ĵ�ˮ�������ó�����10m��
��ͬһˮ�ߺڡ����������
ǰ�ߣ�(13)��(6)+![]() ��(7)��
��(7)��
��ߣ�(14)��(3)+ ![]() ��(18)��
��(18)��
����ˮ�������ó�����2mm���ĵ�ˮ�������ó�����3mm��K1��K2�ֱ�Ϊǰ����ߵĺ졢���泣���
�۸߲����
����߲(15)=(3)��(6)
����߲(16)=(8)��(7)
��˼��㣺(17)=(14)��(13)=(15)��(16) ��0.100������ˮ�������ó���3mm���ĵ�ˮ�������ó���5mm��
�߲�������(18)��![]() {(15)+[(16)
��0.100]}��
{(15)+[(16)
��0.100]}��
���������¼���������6-14���۲�ʱ�������ֱ���վij����ޣ�Ӧ�����ز⣬ֻ�и������������������վ��
(3)ÿҳ������ܼ��
У�˼��㣺
 �����ͼƬ�Ŵ�
�����ͼƬ�Ŵ�
��ÿ��վ��˵Ļ����ϣ�Ӧ����ÿҳ����ļ�ˡ�
��վ��Ϊż��ʱ��
![]()
��վ��Ϊ����ʱ��
![]()
(4) ˮ·�߲����ɹ��ļ��㡢���
�����ĵȸ��ϻ�պ�ˮ·�߸߲�պϲ�ļ��㡢������������ͨˮ������ͬ(����2��)��
��������Χ�ϴ�ʱ��Ҫ�������ˮ·�ߡ�Ϊ��ʹ��ˮ��߳̾��Ⱦ��ȣ�����Ѹ��߶�����һ�𣬹���ͳһ��ˮ����������С���˷�ԭ������ƽ��Ӷ�������ˮ��ĸ̡߳�
��6.7 ���Ǹ߳�
������������������ϴ��������ˮʩ��ʱ����Ӧ�����Ǹ̲߳����ķ����ⶨ�����ĸ߲����ø̡߳��÷���ˮ�������ȵͣ�������ɽ�����ֱ����߲�ͼ�ĸ߳̿��ơ�
6.7.1 ���Ǹ̲߳���ԭ��
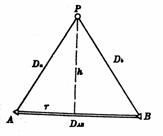
���Ǹ̲߳����Ǹ��ݲ�վ������������ˮƽ����Ͳ�վ��Ŀ������۲����ֱ�������������ĸ߲
��ͼ6-24����֪A��߳�![]() ������B��߳�
������B��߳�![]() ��������������A�㣬��BĿ�궥��M�������ֱ��
��������������A�㣬��BĿ�궥��M�������ֱ��![]() ����ȡ������
����ȡ������![]() ��Ŀ���
��Ŀ���![]() ��������AM֮�����D�䣬��߲�
��������AM֮�����D�䣬��߲�![]() Ϊ��
��
![]() (6-50)
(6-50)
��������ƽ��ΪD����A��B�߲�Ϊ��
![]() (6-51)
(6-51)
B��߳�Ϊ��
![]()
6.7.2 �������ʺʹ����۹�Ը߲��Ӱ��
�������ڼٶ��������Ϊˮƽ��(����ˮ�浱��ˮƽ��)����Ϊ�۲�������ֱ�ߵ������µ����ġ��������������ľ���С��300mʱ�����õġ������������300mʱ��Ҫ�˼��������ʣ��������ʸ�������Ϊ��������ͬʱ���۲������ܴ�����ֱ�۹��Ӱ�����Ϊһ��������Ļ��ߣ�������Դ�����ֱ�۹���������Ϊ�����������������ϳ�Ϊ�������������ƶ��������
��ͼ6��25��OΪ�������ģ�RΪ�������ʰ뾶(R��6371km)��A��BΪ���������㣬DΪA��B������ˮƽ���룬R��Ϊ��������P���ˮ�����ʰ뾶��PE��AF�ֱ�Ϊ��P���A���ˮ�档ʵ�ʹ۲���ֱ��![]() ʱ��ˮƽ�߽���G�㣬GE�������ڵ������ʶ������ĸ߳��������÷���c��ʾ�����ڴ����۹��Ӱ�죬����Ŀ��N�Ĺ��ػ���PN����������Զ��������Զ��ȴλ�ڻ���PN������PM�ϣ�MN��Ϊ������ֱ�۹�����ĸ߳���������÷���
ʱ��ˮƽ�߽���G�㣬GE�������ڵ������ʶ������ĸ߳��������÷���c��ʾ�����ڴ����۹��Ӱ�죬����Ŀ��N�Ĺ��ػ���PN����������Զ��������Զ��ȴλ�ڻ���PN������PM�ϣ�MN��Ϊ������ֱ�۹�����ĸ߳���������÷���![]() ��ʾ��
��ʾ��
 �����ͼƬ�Ŵ�
�����ͼƬ�Ŵ�
ͼ6-25 ���Ǹ̼߳�����Ӱ��
����A��B������ˮƽ����D�����ʰ뾶R��֮��ֵ��С�����統D��3kmʱ��������Բ�Ľ�ԼΪ2��.8���ʿ���ΪPG���ƴ�ֱ��OM����
![]()
���ǣ�A��B����߲�Ϊ��
![]() (6-52)
(6-52)
��![]() ����ʽΪ��
����ʽΪ��
![]() (6-53)
(6-53)
��ͼ6-25��֪��
![]()
��
![]()
![]() ��
��![]() ��Ⱥ�С������ȥ�������ǵ�
��Ⱥ�С������ȥ�������ǵ�![]() ��
��![]() �����������
�����������![]() ����
����![]() ������ʽΪ��
������ʽΪ��
![]() (6-54)
(6-54)
�����о����������ֱ�۹�����������߱��������ʰ뾶ԼΪ�������ʰ뾶��7������
![]() (6-55)
(6-55)
���������
![]() (6-56)
(6-56)
ˮƽ����D�Թ���Ϊ��λ��
��6-15������1km�ڲ�ͬ����Ķ����������
����������� ��6-15
|
D(km) |
0.1 |
0.2 |
0.3 |
0.4 |
0.5 |
0.6 |
0.7 |
0.8 |
0.9 |
1.0 |
|
|
0 |
0 |
1 |
1 |
2 |
2 |
3 |
4 |
6 |
7 |
���Ǹ̲߳���һ�㶼���ö���۲⣬����A��۲�B�㣬����B��۲�A�㣬ȡ����۲����ø߲����ֵ��ƽ�����ɵ��������Ӱ�졣
6.7.3 ���Ǹ̲߳����Ĺ۲�ͼ���
(1)���Ǹ̲߳����Ĺ۲�
�ٰ��þ�γ���ڲ�վ�ϣ���ȡ������![]() ��Ŀ��
��Ŀ��![]() ��
��
�ڵ���˿��Ŀ��ʱ��������ˮ�����ݾ��У���ȡ���̶������������������ҽ��й۲⡣
����ֱ�ǹ۲���������Ӧ���ϱ�6-16�Ĺ涨��
���õ�Ų�����Dz�����������б����D�䣬�������Dz������������������ˮƽ����D��
��ֱ�ǹ۲������������6-16
 ��ֱ�ǹ۲����������
��6-16
��ֱ�ǹ۲����������
��6-16
|
|
�ĵȺ�һ������С���� |
һ�������������� |
||
|
DJ2 |
DJ6 |
DJ2 |
DJ6 |
|
|
����� |
2 |
4 |
1 |
2 |
|
�������ֱ�ǻ����� |
15�� |
25�� |
15�� |
25�� |
(2)���Ǹ̲߳�������
���Ǹ̲߳������������õĸ߲�֮��(�����������)��Ӧ����0.1Dm(DΪ�߳����Թ���Ϊ��λ)��
���Ǹ̲߳���·��Ӧ��ɱպϸ���·�ߡ���ͼ6-26�����Ǹ̲߳�������A-B-C-D-A�պ�·�߽��У�ÿ�߾�ȡ����۲⡣�۲�������ͼ�ϣ���·�߸߲�պϲ�![]() ������ֵ����ʽ���㣺
������ֵ����ʽ���㣺
![]() (6-57)
(6-57)
ʽ��D�Թ���Ϊ��λ
��![]() ���պϲ��߳������ȷ�������߲�ٰ�������ĸ߲��������ĸ̡߳�ͼ6-26�������6-17��
���պϲ��߳������ȷ�������߲�ٰ�������ĸ߲��������ĸ̡߳�ͼ6-26�������6-17��
 �����ͼƬ�Ŵ�
�����ͼƬ�Ŵ�
ͼ6-26 ���Ǹ̲߳����۲�ɹ���ͼ
���Ǹ̲߳����ĸ߲����� ��6-17
|
����� |
A |
B |
�� |
||
|
����� |
B |
C |
�� |
||
|
|
�� |
�� |
�� |
�� |
|
|
ˮƽ����D(m) |
581.38 |
581.38 |
488.01 |
488.01 |
�� |
|
��ֱ�� |
+11��38��30�� |
-11��24��00�� |
+6��52��15�� |
-6��34��30�� |
�� |
|
������ |
1.44 |
1.49 |
1.49 |
1.50 |
�� |
|
Ŀ��� |
-2.50 |
-3.00 |
-3.00 |
-2.50 |
�� |
|
������� |
+0.02 |
+0.02 |
+0.02 |
+0.02 |
�� |
|
�߲�(m) |
+118.74 |
-118.72 |
+57.31 |
-57.23 |
�� |
|
ƽ���߲�(m) |
+118.73 |
+57.27 |
�� |
||